
线性回归#
1. 线性回归#
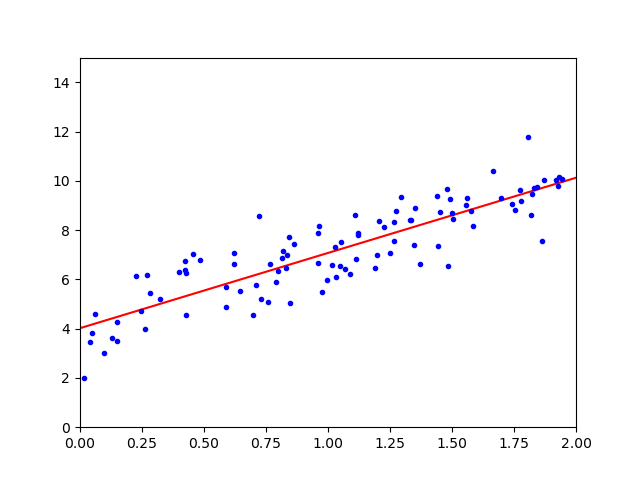
1.1. 简单线性回归#
广义上的线性回归,包括线性回归和多项式回归,其目的是找到一条直线或曲线,并以最小的误差来拟合数据,回归的核心就是寻找误差的最小值。
回归分析的前提是,\(𝑿_i\)相互独立,\(𝒀\)服从高斯分布
对于简单线性回归,其总体回归线可表示为
其中,\(ϵ\)为均值为\(0\)的随机误差,其简化形式为
这里,\(θ_0\)和\(θ_1\)为未知常量,被称为模型的系数(coefficient)或参数(parameter)。通过训练数据,对其进行估计,即可得到想要的预测值:
1.2. 多元线性回归#
设有\(p\)个不同的预测器,则多元线性回归模型为:
经过系数估计,可得
1.3. 模型语言#
对线性模型回归模型
其中,
\(𝑿\)被称为模型的设计矩阵(design matrix)。
\(𝒀_i\)被称为回归量(regressand),内生变量,响应变量,测量变量。
\(𝑿_i\)被称为回归子(regressor),外生变量,解释变量,协变量(covariates)。通常情况下,回归子中会包含一个常数,\(θ\)中的对应值为截距。线性模型的许多统计推断过程需要存在截距,即使理论上其值应为零。
\(θ\)为参数向量,也称效应量(effects),只要参数向量是线性的,模型就保持线性。
\(ϵ_i\)为残差、误差项或噪音(noise),误差项和回归量之间的关系,例如它们是否相关,是制定线性回归模型的关键步骤。
Operator |
Meaning |
|---|---|
|
因变量 - 自变量连接符,弱相关 |
|
因变量 - 自变量连接符,强相关 |
|
取并集 |
|
取差集 |
|
所有关系,\(a*b ≡ a + b + a:b\) |
|
非交互关系,\(a/b ≡ a + b\) |
|
交互关系连接符 |
1.4. 运算复杂度#
规范方程需要计算的\(𝑿^{⊤}𝑿\)的逆是一个\((n + 1) × (n + 1)\)的矩阵,其运算复杂度为\(O(n^{2.4})\)∼\(O(n^3)\),即,若特征\(n\)加倍,则运算时间将乘以\(2^{2.4}∼2^3\)倍。
相比较之下,SVD 的运算复杂度只有\(O(n^2)\)。从积极的一面来看,两者均与训练集中的实例数(它们为\(O(m)\))呈线性关系,故,只要它们适合内存,它们就可有效地处理大型训练集。
2. 模型检验#
2.1. 估计系数#
在做出预测之前,需要根据数据集估计系数。令
表示\(n\)组实例,每组中都包含\(𝑿\)和\(𝒀\)的一个观测值。此处使用最常用的残差平方和(residual sum of squares,RSS)来度量误差(error),用\(e_i = y_i - ŷ_i\)表示第\(i\)个残差(residual),则
使用普通最小二乘法(Ordinary Least Squares,OLS)选择\(θ_0\)和\(θ_1\)来使\(\mathrm{\mathrm{RSS}}\)最小,求出
这里,\(ȳ ≡ \frac{1}{n} ∑y_i\) 和 \(x̄ ≡ \frac{1}{n} ∑_{i=1}^{n x_i}\) 为样本均值,这种估计即称为最小二乘估计(least squares estimates,LSE),可表示为:
求导得
\(\frac{∂𝑿^{⊤}𝑨}{∂𝑿} = 𝑨\), \(\frac{∂𝑨𝑿}{∂𝑿} = 𝑨^{⊤}\), \(\frac{∂𝑿^{⊤}𝑨𝑿}{∂𝑿} = (𝑨 + 𝑨^{⊤})𝑿\)
即\(\hat{θ}\)是\(𝒀\)的线性组合,这个等式被称为规范方程(Normal Equation)。
为了避免\(𝑿\)不可逆的情况,实践中多使用奇异值分解(Singular Value Decomposition,SVD)来代替求解规范方程:
其中,\(𝑿⁺\)是\(𝑿\)的伪逆(pseudo-inverse),也叫 Moore-Penrose 逆,其由下式给出:
对于矩阵\(𝜮⁺\),SVD 取\(𝜮\),并将所有<微小阈值的值设置为 0,然后将所有非零值替换为其反值,最后对所得矩阵进行转置。